話題
「箱」がつま先立ち! JAXA開発の超絶バランス体、その仕組みとは
まるでつま先立ちをするように、一つの頂点のみで姿勢を維持する立方体が話題になっています。
話題
まるでつま先立ちをするように、一つの頂点のみで姿勢を維持する立方体が話題になっています。
【ネットの話題、ファクトチェック】
まるでつま先立ちをするように、一つの頂点のみで姿勢を維持する立方体が話題になっています。動画を見ると、机に置かれた状態から、まずは一辺のみでバランスをとり、最後は1つの頂点だけ接地させて立ち続けます。「超小型三軸姿勢制御モジュール」と名付けられた装置で、宇宙航空研究開発機構(JAXA)が開発したものです。いったいどんな仕組みで、何のために作ったのか? 物理が苦手な人でもわかるように教えてもらいました。
先月末、「JAXAでとんでもないロボットに遭遇した」という文言とともにツイッター投稿された動画。そこには「超小型三軸姿勢制御モジュール」が動く様子が映っています。
地面に置かれた状態から起き上がり、まずは一辺のみでバランスをとります。しばらくすると、1つの頂点だけを接地させて姿勢を維持し始めます。
この動画に対して、「うおおお!って言っちゃった」「どういう原理ですか?」「すごいけど何の役に立つ?」といったコメントが寄せられ、リツイートは4万、いいねは6万を超えています。
いったいどんな仕組みで姿勢を維持しているのか? JAXA部門第一研究ユニットの主任研究開発員・巳谷真司さんに、わかりやすく説明してもらいました。
――常時公開されているのでしょうか
「常時は公開されていません。今年は9月30日に、年1回開催しているJAXA筑波宇宙センター特別公開のイベントで公開しました。Twitterで取り上げていただいた動画は、この特別公開時の映像です。他にも、関係イベントで参考出展することがあります」
――JAXAが独自に開発したものですか
「この10cmモジュールは独自に開発しました。同様の原理(ホイールを用いた姿勢制御)は、古くから人工衛星で用いられています。頂点で自立するロボットとしては、2013年にスイスのチューリッヒ工科大学がCubliという装置を開発しています。Cubliの論文が何編か出版されており、制御方法や装置構成などを調べたうえで、人工衛星の姿勢制御装置として応用できるように、JAXA独自の改良を新たに考案しています。例えば、Cubliは一辺が15cmの立方体ですが、JAXAではブレーキの仕組みなどを独自開発し、一辺が10cmの立方体にまで小型化しました。Twitterで話題となったのは、この10cmの立方体ロボットですが、その後31mmの立方体にまで小型化しています」
――姿勢を維持する仕組みを教えてください
「例えば、崖から落ちそうになるときに必死に両腕をぐるぐる回すと、落ちずに耐えられるという経験があると思います。そのときに、両腕を回す向きによっては逆効果になることも経験上分かると思います。前方向に落ちそうなとき、後ろ方向に落ちそうなときで、両腕を回す方向を切り換えたほうが、上半身のバランスを保っていられます」
「このモジュールが辺や頂点でバランスをとっていられるのも、これと全く同じ原理です。ただし、このモジュールは、ぐるぐる回す腕の代わりに、立方体の内部に、ホイールと呼ばれるモーターで回る車輪を持っています。このホイールをぐるぐる回して、ときにはホイールの回転方向を切り換えながら、バランスを保っています」
――まずは一辺でバランスをとった後、次に立方体の一つの頂点のみで姿勢を維持しますが、この仕組みは
「辺でバランスをとっているときも、頂点で姿勢のバランスをとっているときも、原理は全く同じです。ただし、辺でバランスをとっているときは、左右の方向にバランスをとれば良かったのが、頂点でバランスをとっている時は、バランスをとる方向がさらに2方向増えます。手前・後ろ方向に更にバランスを取らなければなりませんし、さらに、頂点を中心にモジュールが方向を変えないように方位を保つようにしなければなりません」
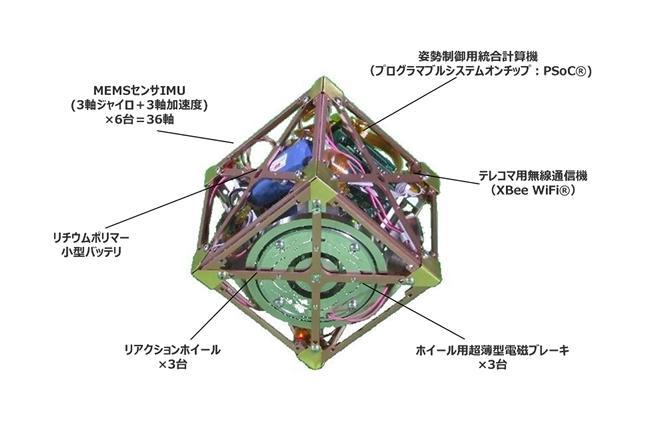
「この合計3方向のバランス制御をするためには、1個のホイールでは不可能です。ロボットの内部に、3個のそれぞれ直交したホイールがあります。この3個のホイールを同様に、独立に回転の速度を変えたり、回転の方向を変えたりすることで、動画のように一つの頂点で倒立静止できます」
――なぜ、急に起き上がるのでしょうか
「自転車を全速力でこいでいる時、急激に前輪ブレーキをかけると、前方向に起き上がって転びそうになる経験があると思います。この現象は『平行移動』と『回転』、それぞれの運動原則の合成によっておきています」
「まず、『平行移動』の運動原則に関して述べます。急にブレーキを掛けると、自転車の車輪は急に地面に対してストップしますが、自転車の本体と搭乗者は、進行方向に移動し続けようとします。この現象は、電車や自動車の急ブレーキによって体が前方向に持って行かれそうになるのと同じ現象ですので、比較的分かりやすいと思います」
「もうひとつの『回転』の運動原則は、大変分かりにくいです。急にブレーキを掛けると、自転車の前輪は急に回転がストップします。当たり前ですが、ブレーキ自身は自転車本体についています。ブレーキを掛けることによって、前輪の回転を止めるだけの逆方向の回転力を出しています。そうすると、ブレーキのある自転車本体には、その回転力と大きさが同じで向きが逆方向の回転力を受けます。つまり、前輪を中心に、前方向に倒れる方向に自転車本体が回転を始めます」
「例えの説明が長くなりましたが、モジュールが起き上がる原理は、この前輪ブレーキの例の『回転の運動原則』を使っています。内部のホイールを急速に回転させ、1分あたり2500回転ほどの速度で回しておきます。その回転をブレーキを使って一瞬のうちに止めると、モジュールが起き上がります」
――いきなり頂点のみで姿勢を維持することも可能なのですか
「可能です。起き上がる方向は、ホイールの回転方向となりますから、直交する3つのホイール軸のうち、使用する軸や回転で止めるスピードを調整することで原理的に可能です」
――指で押したり、床を揺らしたりしても倒れないのでしょうか
「指で押す力や、床を揺らす度合いにもよりますが、ある程度なら倒れません」
――このようなモジュールを作ろうと思ったきっかけは
「ジャイロやリアクションホイールなどを10cmキューブの1パッケージとすることで、衛星の超小型化や姿勢制御コンポの低コスト化、省スペース化を実現することがコンセプトでした。社内の競争的研究である萌芽研究(部門長裁量研究)に採択され、2014年度から着手しました」
――応用した製品はありますか
「このモジュールを搭載した製品として、6月に国際宇宙ステーションの日本実験モジュール『きぼう』で実証した宇宙船ドローン『Int-Ball』があります」
「今後、この三軸モジュールの技術をいろいろなところに普及させていきたいと思っています。Int-Ballや人工衛星の制御以外にも応用先はあるのではないかと思っています。たとえば、地上のドローンの姿勢安定装置や、小惑星『イトカワ』のような微小重力天体はもちろん、火星のような重力天体の表面上を転がって移動する探査ロボットにも利用できるでしょう」
「また、今は単独で動作していますが、大量の小型ロボット群として用いてマルチエージェントシステムを形成するような研究にも応用できると考えています。10個とか100個、1000個といった数のモジュールがあった時に、それぞれが双方向に通信して相互作用を起こし、個々のモジュールでは困難なタスクをモジュール全体で達成するというようなシステムのことです。これまでの成果を広く知ってもらい、さまざまな応用先や量産のためのパートナーを探していきたいと思っています」
――ツイッターで話題になったことについては
「今回、Twitterなどで配信・拡散してくれた方に感謝します。これらを通じて、一般の人に姿勢制御のすごさと不思議さを少しでも感じていただけたのなら、うれしいです。また、これをきっかけに宇宙開発に対する理解を深めていただいたり、足を踏み入れていただけたりしてもらえれば、なおのことうれしいです」

